The microcontroller is a self-contained system with peripherals, memory and a processor that can be used as embedded system.
- Microprocessor is managers of the resources (I/O, memory) which lie outside of its architecture.
- Microcontroller have I/O, memory, etc. built into it and specifically designed for control.
For embedded system, the buses used for communication includes
- I2C: It is used for communication between multiple ICs
- CAN: It is used in automobiles with centrally controlled network
- USB: It is used for communication between CPU and devices like mouse, etc.
While ISA, EISA, PCI are standard buses for parallel communication used in PCs, computer network devices, etc.
The hard real time systems are the one that depend on the output very strictly on time. Any late response or delay cannot be tolerated and will always be considered a failure. The soft real time systems on the other are not very rigid as the hard real time systems. The performance of the system degrades with the lateness of response, but it is bearable and can be optimized to a certain level for reuse of the result.
The recursive functions refer to the functions which make calls to itself before giving out the final result. These can be declared as in-line functions and the compiler will allocate the memory space intended for the first call of the function.
- Power supply
- Processor
- Memory
- Timers-Counters
- Communication Ports
- I/O circuits.
- Specific Circuits
- IDE and Compiler
- Assembler
- Emulator
- Debugger
- IDE and Compiler
I2C
- I2C can be multi-master and multi-slave, which means there can be more than one master and slave attached to the I2C bus.
- I2C is a half-duplex communication protocol
- I2C has the feature of clock stretching, which means if the slave cannot able to send fast data as fast enough then it suppresses the clock to stop the communication.
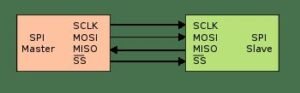
SPI
- SPI can be multi-save but does not a multi-master serial protocol, which means there can be only one master attached to the SPI bus.
- SPI is a full-duplex commination protocol.
- Clock stretching is not the feature of SPI.
RTOS stands for Real-Time Operating System. It specially designed to run the application with very precise timing and a high degree of reliability. An RTOS system must have response time predictability and it must be deterministic.
The serial peripheral interface is four wire-based protocol these wire generally known as MOSI (master out slave in), MISO (master in slave out), SCL (serial clock which produces by the master) and SS (slave select line which use to select specific slave during the communication).
A Controller Area Network (CAN bus) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other in applications without a host computer. It is a message-based protocol, designed originally for multiplex electrical wiring within automobiles to save on copper, but can also be used in many other contexts.